呢個相信 都係大家既回憶黎.

走迷官既 螢幕保護程式.
每次迷官都係隨機生成,
但佢點解 一定會搵到 終點呢?

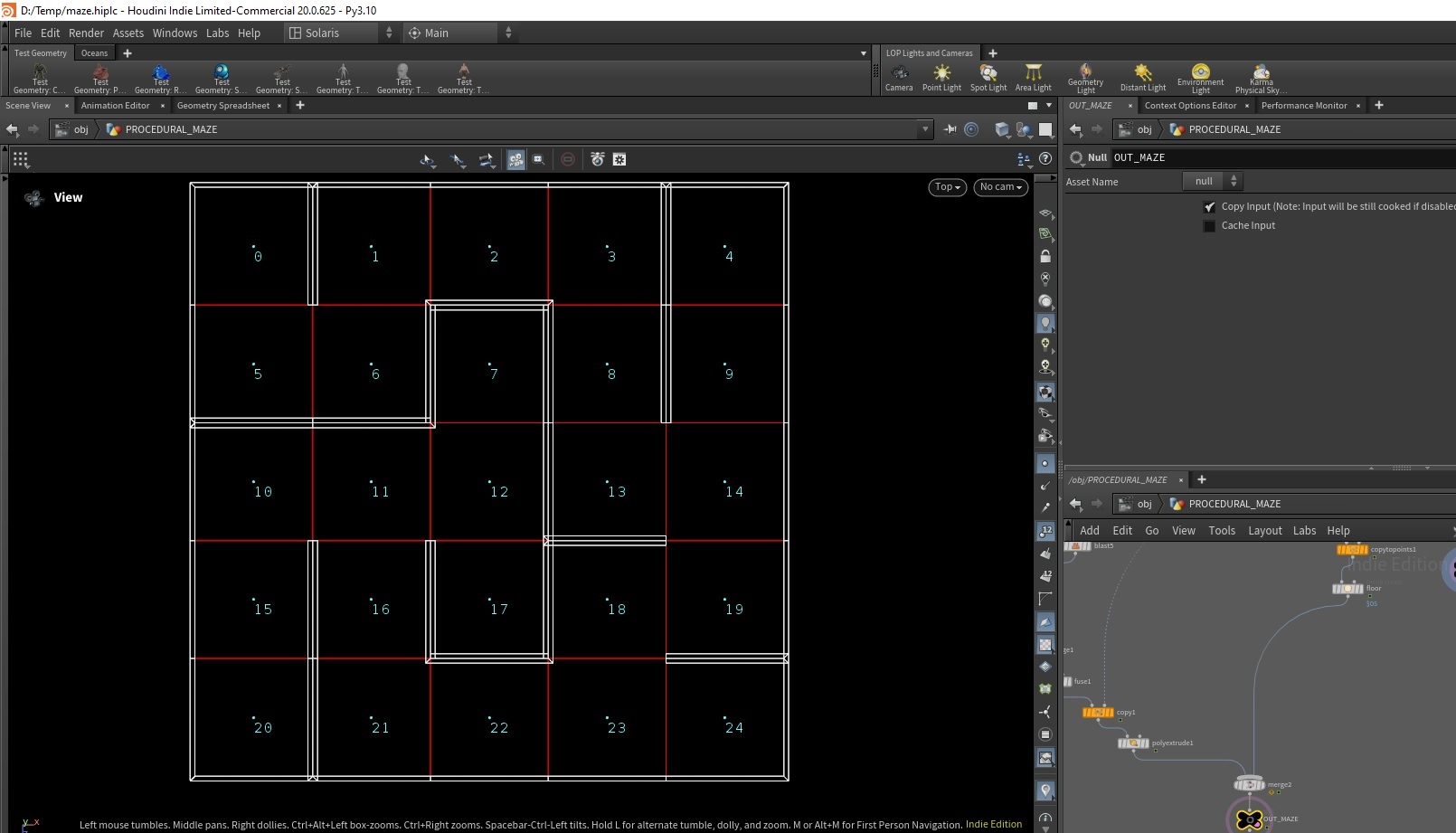
1. 首先講下 我會點樣generate一個maze (Simply connected space)
去放入Houdini做simulation.
同一個目標 可以用唔同既演算法.
試下簡單既Recursive Backtracking algorithm
backtracking意思係試一試既心態
睇下搵唔搵到一個有效既解答.
如果中途 解決唔到 就取消上一步/上幾步既計算.
再次嘗試尋找問題的答案.
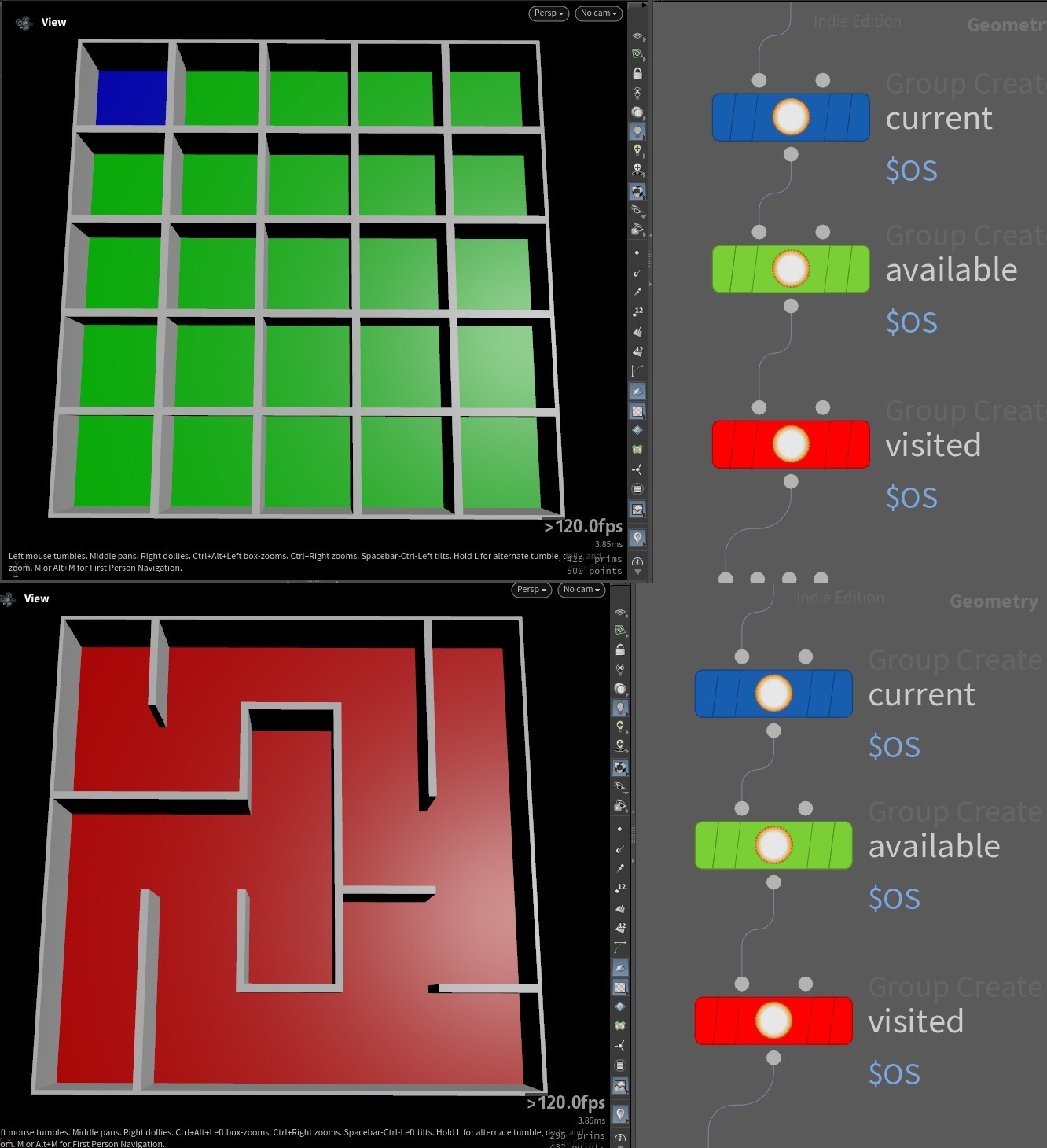
例子: 整個5x5既maze熱身先.
現在位置 Current 藍色
未去過既位置 Available 綠色
去左既位置 visited 紅色
上面係一開波, 下面係結果.
首先, 每一步隨機會選擇一個方向.
如果該方向係有牆擋著, 而且係Available既.
照行啦, 再mark低已經去左visited 同埋路線既記錄.
(佢有牆擋著 + 牆既下一格又無野, 姐係無效
 )
)
 死 行行下無路走.
死 行行下無路走. 好彩我有行既記錄 = [ 0, 0, 5, 6, 1, 2, 3, 8, 13, 14, 9 ]
好彩我有行既記錄 = [ 0, 0, 5, 6, 1, 2, 3, 8, 13, 14, 9 ]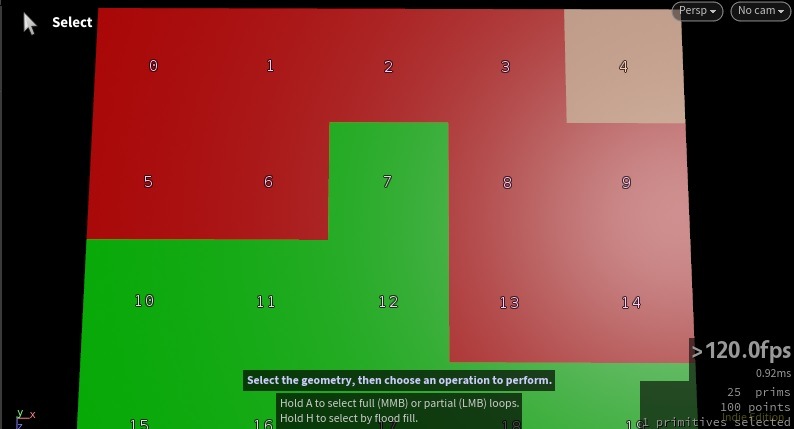
重頭戲Backtrack. 行返轉頭,
又係隨機選擇一個方向 如果係未行過Available
就繼續照行落去.
結局: 最後會返去 最先頭既位置. 所以我地可以確定 全部cell係一定行過既.

迷宮完成. 到解題.
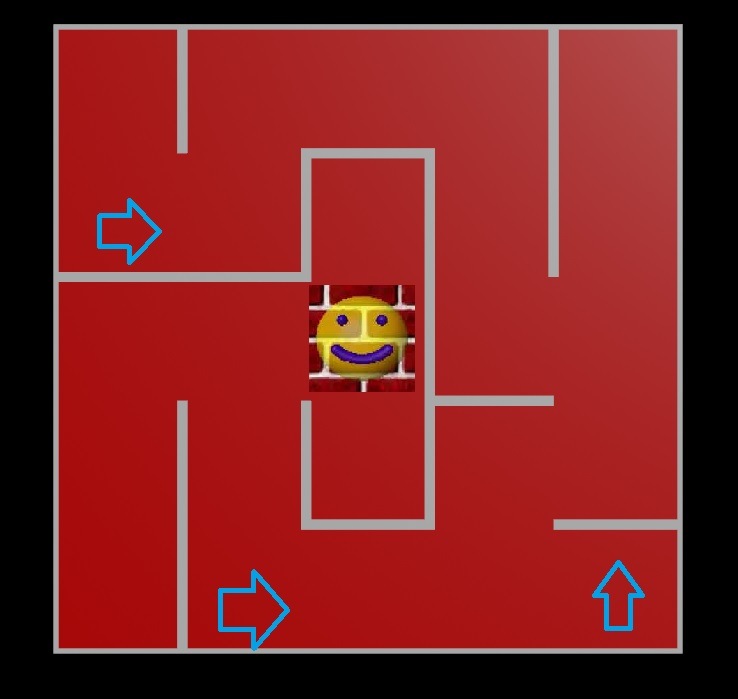
其實個螢幕保護程式 搵路走唔難
每次都會用沿牆法 (左/右手法則)
下圖係用右手法則.
我印像, 一開波係左手, 但遇到石頭 會上下調轉, 變右手.

只要靠著迷宮的一側牆不斷前進
每次遇到岔路都轉向同個方向,如每次遇岔路都右轉或都左轉)
就一定行得晒條迷官, 而代表終點既公仔 一定係隨機既一個位置.
結論: 因為行得晒條迷官, 所以一定會經過終點公仔既位置.

呢一個algorithm缺點
 (20x20)
(20x20)已經開始聞到Big(O)既味道.

我本人唔太好algorithm.
但佢會幫你有系統 有條理地 實現好多野.











 睇黎都差唔多年紀.
睇黎都差唔多年紀.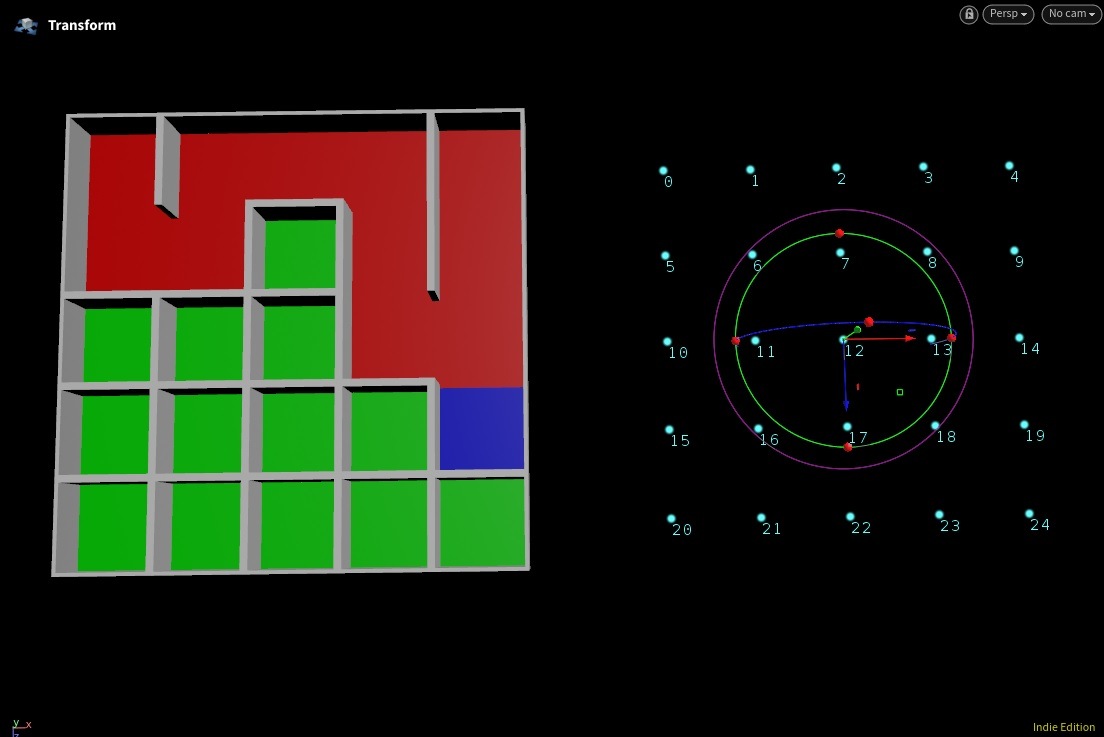



 咁就神仙難救了.
咁就神仙難救了.

 大量頭髮.
大量頭髮.